1710127193
2024-03-10 11:50:01
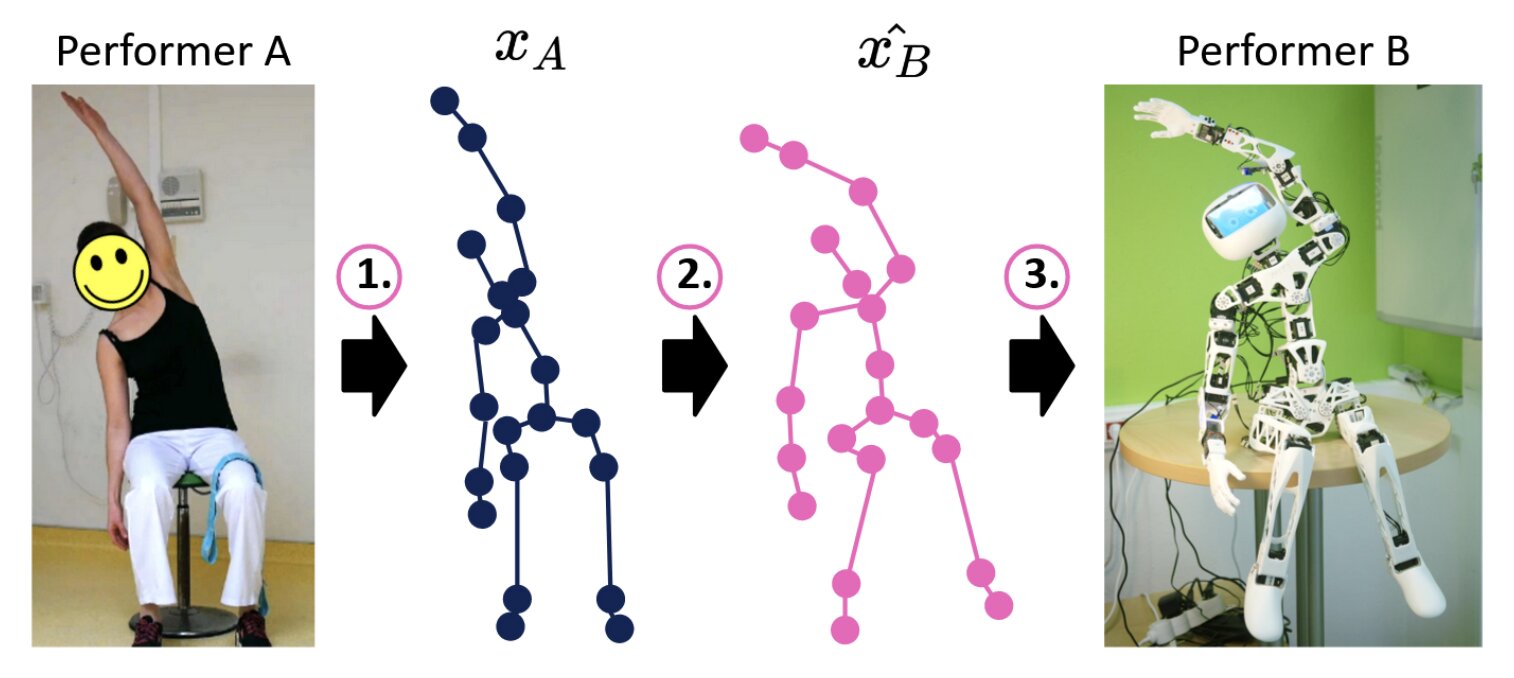
人間とロボットの模倣プロセスのステップ: 1) 出演者 A のビデオから姿勢推定を出力し、一連の関節位置 x を出力します。あ、2) モーション リターゲットにより関節位置 x が変換されます。あ 関節位置xにB 演者 B の場合、3) ロボット制御が低レベルの制御を送信します。 クレジット: Annabi 他
人間の行動や動きをリアルタイムで厳密に模倣できるロボットは、事前に広範なタスクをプログラムすることなく、特定の方法で日常のタスクを完了する方法を学習できるため、非常に役立つ可能性があります。 模倣学習を可能にする技術はここ数年で大幅に改善されましたが、ロボットの身体と人間のユーザーの身体の間に対応関係がないことが、そのパフォーマンスの妨げとなることがよくあります。
U2IS の研究者、ENSTA Paris は最近、新しい ディープラーニングを改善できるベースのモデル モーション 人型ロボットシステムの模倣能力。 このモデルは、 紙 に事前公開された arXivは、人間の負担を軽減するために設計された 3 つの異なるステップとして動作の模倣に取り組みます。ロボット 過去に報告された対応の問題。
「この初期段階の研究作業は、一連の関節位置を人間の動作の領域から、そのロボットの実施形態によって制約される特定のロボットによって達成可能な動作の領域に変換することによって、オンラインでの人間とロボットの模倣を改善することを目的としています」と、Louis Annabi、Ziqi Maとサオ・マイ・グエン氏は論文に書いている。 「深層学習手法の一般化機能を活用して、エンコーダ/デコーダを提案することでこの問題に対処します。 ニューラルネットワークモデル ドメイン間の変換を実行しています。」
Annabi、Ma、Nguyen によって開発されたモデルは、人間とロボットの模倣プロセスを 3 つの主要なステップ、つまり姿勢推定、モーション リターゲット、ロボット制御に分割しています。 まず、姿勢推定アルゴリズムを利用して、人間のエージェントが示す動きの基礎となる骨格と関節の位置のシーケンスを予測します。
続いて、モデルは、この予測された骨格関節位置のシーケンスを、ロボットの本体によって現実的に生成できる同様の関節位置に変換します。 最後に、これらの変換されたシーケンスはロボットの動作を計画するために使用され、理論的には、ロボットが当面のタスクを実行するのに役立つ動的動作が得られます。
「そのようなモデルをトレーニングするには、関連するロボットと人間の動作のペアを使用できます。 [yet] 「このようなペアになったデータは実際には非常にまれであり、収集するのは面倒である。したがって、私たちは、人間とロボットの翻訳を実行するために適応させた、ペアになっていないドメイン間の翻訳のための深層学習手法に注目する」と研究者らは論文で述べている。模倣。”
Annabi、Ma、Nguyen は一連の予備テストでモデルのパフォーマンスを評価し、深層学習に基づかない関節の向きを再現する簡単な方法と比較しました。 彼らのモデルは期待していた結果を達成できず、現在の深層学習手法ではモーションをうまく再ターゲットできない可能性があることを示唆しています。 リアルタイム。
研究者らは現在、さらなる実験を行ってアプローチの潜在的な問題を特定し、それに取り組み、モデルを適応させてパフォーマンスを向上させることを計画している。 研究チームのこれまでの調査結果は、教師なし深層学習技術をロボットでの模倣学習を可能にするために使用できるものの、そのパフォーマンスが実際のロボットに導入するにはまだ十分ではないことを示唆している。
「将来の研究は、現在の研究を 3 つの方向に拡張します。前のセクションで説明したように、現在の方法の失敗をさらに調査し、人間と人間の模倣またはロボットと人間からペアのモーション データのデータセットを作成します。」 模倣そして、より正確なリターゲティング予測を得るためにモデル アーキテクチャを改善することです」と研究者らは論文で結論付けています。
詳しくは:
Louis Annabi 他、人間とロボットの模倣のための教師なしモーション リターゲティング、 arXiv (2024年)。 DOI: 10.48550/arxiv.2402.05115
© 2024 サイエンス X ネットワーク
引用: 人間の動作を模倣するロボットのための教師なし深層学習モデルのテスト (2024 年 3 月 10 日) https://techxplore.com/news/2024-03-unsupervised-deep-robot-imitation-human.html より 2024 年 3 月 10 日に取得
この文書は著作権の対象です。 個人的な研究や研究を目的とした公正な取引を除き、書面による許可なしにいかなる部分も複製することはできません。 コンテンツは情報提供のみを目的として提供されています。
#人間の動作をロボットが模倣するための教師なし深層学習モデルをテストする