1716143926
2024-05-17 18:12:03
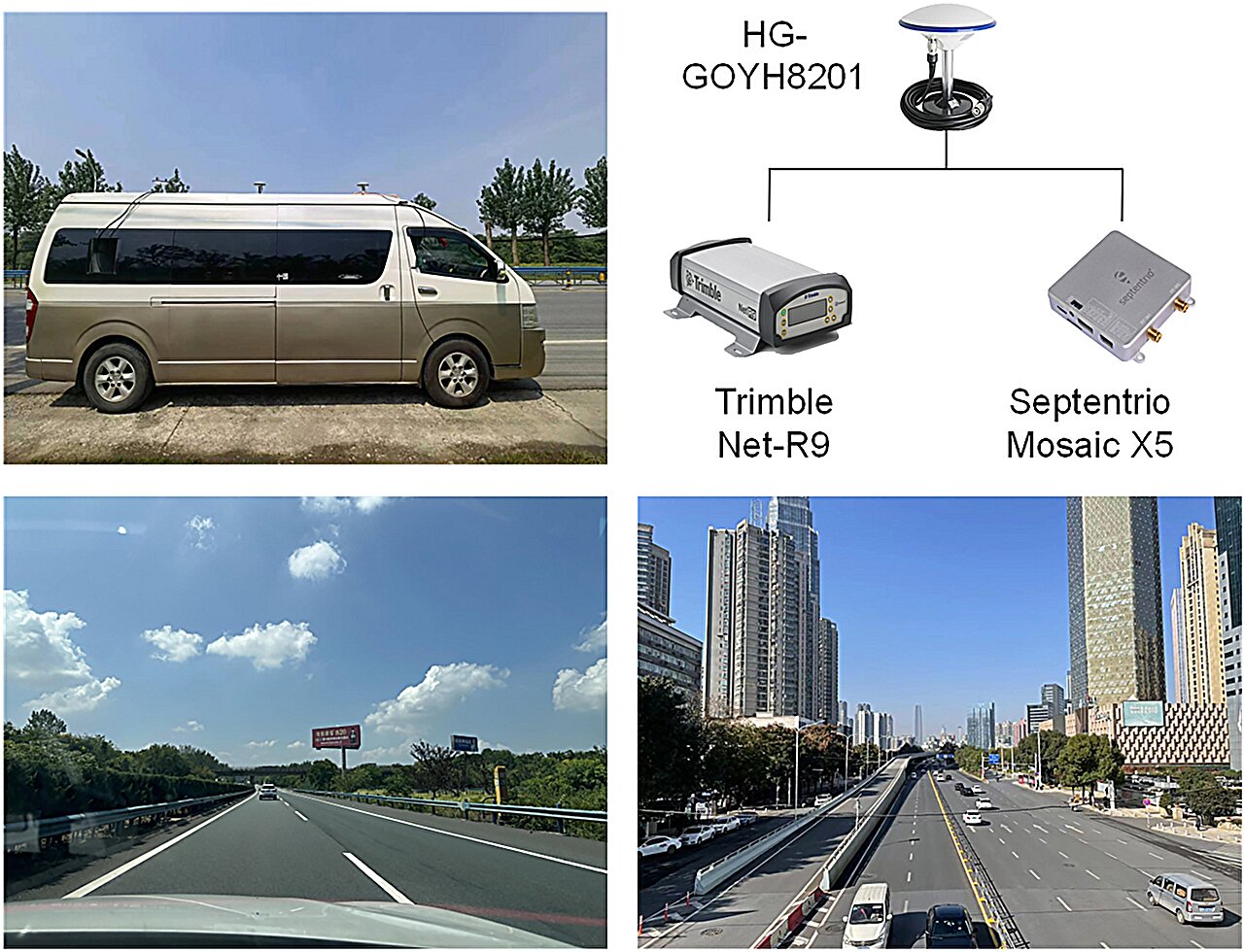
クラウドソーシング RTK: 大量の車両 GNSS データに基づいて空間高解像度大気マップを構築するための新しい GNSS 測位フレームワーク。 クレジット: 衛星ナビゲーション (2024年)。 DOI: 10.1186/s43020-024-00135-8
革新的な全地球測位衛星システム (GNSS) 測位技術は、車両が生成した大量のデータを利用して高解像度の大気遅延補正マップを作成し、さまざまな空間スケールにわたって全地球測位システム (GPS) の精度を大幅に向上させます。 この新しい方法は、リアルタイムのクラウドソースの車両 GNSS 生データを活用し、従来の GPS アプリケーションを改良し、正確な測位のためのコスト効率の高いソリューションを提供します。
全球測位衛星システム (GNSS) の精度の向上の追求は、まばらで高コストのインフラストラクチャに依存する現在の大気補正モデルの限界によって妨げられています。 これらの従来のモデルは、特に自動運転などの動的な環境において、正確な位置決めに必要な高解像度データを提供するのに苦労しています。 この研究の登場により、詳細な大気マップを生成するクラウドソーシングのアプローチを提案することでこの課題に対処し、GNSS パフォーマンスの大幅な向上とコスト削減が期待できます。
中国科学院の研究者が革新的なGNSS測位フレームワークを開発 出版された 2024 年 5 月 13 日、 衛星ナビゲーション。 この研究では、デュアル基地局とクラウドソースの大気遅延補正マップ (CAM) を使用して、自動運転やモノのインターネット (IoT) などのアプリケーションにとって大幅な進歩である高精度測位を実現するシステムについて詳しく説明しています。
この研究では、デュアル基地局と大規模な基地局を活用する新しい GNSS 測位フレームワークが導入されています。 車両 データを利用して高解像度の大気マップを作成し、GNSS の精度を高めます。 CAM と呼ばれるこのクラウドソーシングのアプローチは、GNSS 受信機を搭載した車両からのデータを利用します。
これらの車両は大気遅延データを収集してクラウド サーバーに送信し、そこで統合および処理されて CAM が継続的に更新されます。 この動的な更新プロセスにより、CAM の空間解像度と位置精度の両方が向上し、公共ユーザーの測位精度が向上します。 リアルタイム。 このフレームワークの中心的な革新は、従来のデータ ソースと比較して豊富ですぐに利用できる一般的な車両 GNSS データの使用にあります。
このデータを集約して改良することにより、この研究は、詳細な大気遅延補正を生成するための費用対効果の高い方法を実現します。 CAM は、従来大気データに使用されていた高価で分散性の低い連続運用基準システム (CORS) ステーションへの依存を大幅に軽減し、高精度 GNSS アプリケーションの実現可能性と精度を向上させるスケーラブルなソリューションを提供します。
主任研究員のユンビン・ユアン博士は、「このフレームワークは、大気データ収集のコストを削減するだけでなく、GNSS測位の精度と信頼性を大幅に向上させ、位置ベースのサービスにおける大きな進歩を示します。」と述べています。
このテクノロジーの応用は、全地球測位システム (GPS) の精度の向上だけにとどまりません。 リアルタイムへの道も開かれます 環境モニタリング そして重大な影響を及ぼします 都市計画、輸送および緊急対応システム。 車両がデータ収集ハブになるにつれて、このテクノロジーの拡張性は、特に高度に都市化された地域において、広範な社会経済的利益を約束します。
詳しくは:
Honjin Xu 他、クラウドソーシング RTK: 大量の車両 GNSS データに基づいて空間高解像度大気マップを構築するための新しい GNSS 測位フレームワーク、 衛星ナビゲーション (2024年)。 DOI: 10.1186/s43020-024-00135-8
中国科学院航空宇宙情報研究院提供
引用: 道路からクラウドへ: 車両全地球航法衛星システムの生データ (2024 年 5 月 17 日) を活用 (2024 年 5 月 19 日に https://techxplore.com/news/2024-05-road-cloud-leveraging-vehicle-global から取得) .html
この文書は著作権の対象です。 個人的な研究や研究を目的とした公正な取引を除き、書面による許可なしにいかなる部分も複製することはできません。 コンテンツは情報提供のみを目的として提供されています。
#車両全地球測位衛星システムの生データの活用