1708354009
2024-02-19 14:28:05
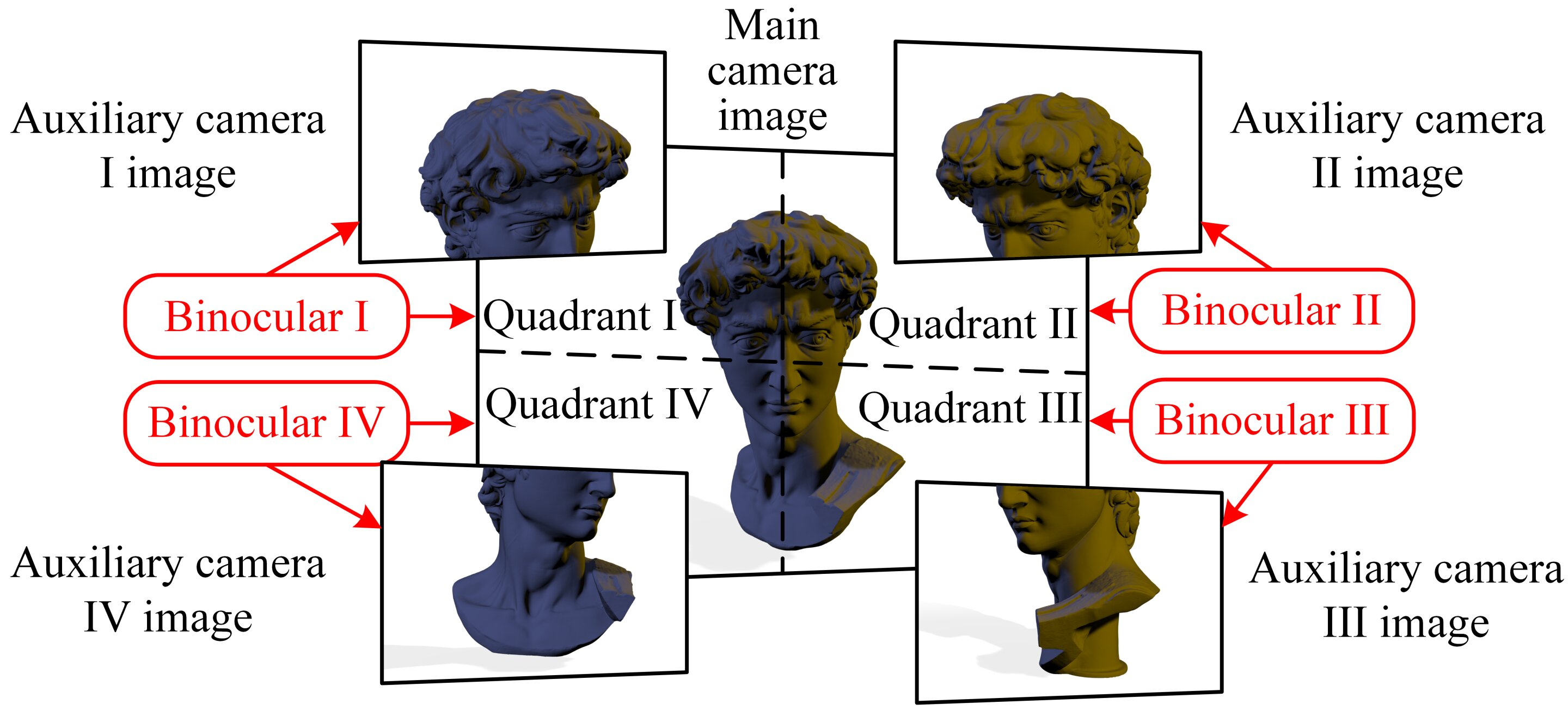
センサーの原理をまとめた図。 クレジット: ヤン他
最近の技術の進歩により、ますます洗練されたセンサーの開発が可能になり、ロボット、ドローン、自動運転車、その他のスマート システムのセンシング機能の向上に役立ちます。 ただし、これらのセンサーの多くは個々のカメラに依存しているため、収集される測定値の精度はカメラの視野 (FOV) によって制限されます。
中国の北航大学の研究者は最近、より広い視野を備え、より多くの情報を収集できる新しいマルチカメラ差動型両眼視覚センサーを開発しました。 正確な測定。 で紹介されたこのセンサーは、 紙 に発表されました 光学およびレーザー技術、幅広いデバイスやスマートロボットシステムに統合できる可能性があります。
「私たちは、携帯電話のマルチカメラモジュールからインスピレーションを受け、無人航空機検出、ロボットナビゲーション、自動運転などの環境認識の高精度要件を目指して、高精度双眼の原理に基づく視覚認識モードを導入しました。視力測定」と論文の共著者であるFuqiang Zhou氏はTech Xploreに語った。 「この原則には中心的な要素が関与しています。 高解像度カメラ と連携して動作する周辺補助カメラ。」
Zhou らによる最近の研究の主な目的は、より広い視野を持つセンサーを開発することでした。 複数のカメラを利用し、戦略的に配置することで、従来の単一カメラベースよりも正確な測定値を収集する調整システムの実現に着手しました。 センサー。

センサーの設計を支える構造。 クレジット: ヤン他
「当社のマルチカメラ差動型両眼視覚センサーは、中央のメインカメラと周辺の4つの補助カメラで構成されています」とZhou氏は説明した。 「メインカメラの4象限画像と4つの補助カメラ画像で4組の双眼鏡を構成します。センサーの構造パラメーターを空間配置、測定範囲、精度の面から最適化し、高精度な3次元測定値を収集します」 。」
周氏らは開発したセンサーを一連の実験でテストし、その視野が従来の双眼カメラよりも大幅に広いことを発見した。 複数のカメラの FOV を組み合わせることで、センサーは周囲のより正確な測定値を収集できます。
「提案されたセンサーは、特に同じマルチカメラ測定方法と比較した場合、他の視覚測定方法よりも測定精度が高く、カメラの数を減らしながら測定精度を向上させることができます。」と周氏は述べています。
将来的には、この研究者チームが開発したセンサーは、半自律型や自動型などの幅広いシステムに統合される可能性があります。 自動運転車、ロボット、およびモーションセンシングデバイス。 これにより、研究者は現実世界の環境でその性能を検証し、将来の商業化を促進するために設計をさらに適応させることができます。
「視覚測定の分野では、高精度を実現するには双眼鏡が最適です」と周氏は付け加えた。 「提案した原理と考え方に基づいて、高精度な ビジョン 広い視野での知覚を実現します。 小型産業用カメラとさらなる小型軽量化を実現する構造設計を組み合わせることで、このセンサーは将来のインテリジェント無人システムにおいてLiDARと同様の標準構成となる可能性があります。」
詳しくは:
Lemiao Yang 他、新しいマルチカメラ差動両眼視覚センサー、 光学およびレーザー技術 (2024年)。 DOI: 10.1016/j.optlastec.2024.110624。
© 2024 サイエンス X ネットワーク
引用: ロボットおよび自律システム用のマルチカメラ差動双眼視覚センサー (2024 年 2 月 19 日) https://techxplore.com/news/2024-02-multi-camera-Differenceial-binocular-vision.html から 2024 年 2 月 19 日に取得
この文書は著作権の対象です。 個人的な研究や研究を目的とした公正な取引を除き、書面による許可なしにいかなる部分も複製することはできません。 コンテンツは情報提供のみを目的として提供されています。
#ロボットおよび自律システム用のマルチカメラ差動型両眼視覚センサー